Asynchronous Optimization Algorithms with Dask Computations that evolve on partial results
This work is supported by Continuum Analytics, the XDATA Program, and the Data Driven Discovery Initiative from the Moore Foundation.
Summary
In a previous post we built convex optimization algorithms with Dask that ran efficiently on a distributed cluster and were important for a broad class of statistical and machine learning algorithms.
We now extend that work by looking at asynchronous algorithms. We show the following:
- APIs within Dask to build asynchronous computations generally, not just for machine learning and optimization
- Reasons why asynchronous algorithms are valuable in machine learning
- A concrete asynchronous algorithm (Async ADMM) and its performance on a toy dataset
This blogpost is co-authored by Chris White (Capital One) who knows optimization and Matthew Rocklin (Continuum Analytics) who knows distributed computing.
Reproducible notebook available here
Asynchronous vs Blocking Algorithms
When we say asynchronous we contrast it against synchronous or blocking.
In a blocking algorithm you send out a bunch of work and then wait for the
result. Dask’s normal .compute() interface is blocking. Consider the
following computation where we score a bunch of inputs in parallel and then
find the best:
import dask
scores = [dask.delayed(score)(x) for x in L] # many lazy calls to the score function
best = dask.delayed(max)(scores)
best = best.compute() # Trigger all computation and wait until complete
This blocks. We can’t do anything while it runs. If we’re in a Jupyter notebook we’ll see a little asterisk telling us that we have to wait.

In a non-blocking or asynchronous algorithm we send out work and track results as they come in. We are still able to run commands locally while our computations run in the background (or on other computers in the cluster). Dask has a variety of asynchronous APIs, but the simplest is probably the concurrent.futures API where we submit functions and then can wait and act on their return.
from dask.distributed import Client, as_completed
client = Client('scheduler-address:8786')
# Send out several computations
futures = [client.submit(score, x) for x in L]
# Find max as results arrive
best = 0
for future in as_completed(futures):
score = future.result()
if score > best:
best = score
These two solutions are computationally equivalent. They do the same work and
run in the same amount of time. The blocking dask.delayed solution is
probably simpler to write down but the non-blocking futures + as_completed
solution lets us be more flexible.
For example, if we get a score that is good enough then we might stop early. If we find that certain kinds of values are giving better scores than others then we might submit more computations around those values while cancelling others, changing our computation during execution.
This ability to monitor and adapt a computation during execution is one reason why people choose asynchronous algorithms. In the case of optimization algorithms we are doing a search process and frequently updating parameters. If we are able to update those parameters more frequently then we may be able to slightly improve every subsequently launched computation. Asynchronous algorithms enable increased flow of information around the cluster in comparison to more lock-step batch-iterative algorithms.
Asynchronous ADMM
In our last blogpost we showed a simplified implementation of Alternating Direction Method of Multipliers (ADMM) with dask.delayed. We saw that in a distributed context it performed well when compared to a more traditional distributed gradient descent. This algorithm works by solving a small optimization problem on every chunk of our data using our current parameter estimates, bringing these back to the local process, combining them, and then sending out new computation on updated parameters.
Now we alter this algorithm to update asynchronously, so that our parameters change continuously as partial results come in in real-time. Instead of sending out and waiting on batches of results, we now consume and emit a constant stream of tasks with slightly improved parameter estimates.
We show three algorithms in sequence:
- Synchronous: The original synchronous algorithm
- Asynchronous-single: updates parameters with every new result
- Asynchronous-batched: updates with all results that have come in since we last updated.
Setup
We create fake data
n, k, chunksize = 50000000, 100, 50000
beta = np.random.random(k) # random beta coefficients, no intercept
zero_idx = np.random.choice(len(beta), size=10)
beta[zero_idx] = 0 # set some parameters to 0
X = da.random.normal(0, 1, size=(n, k), chunks=(chunksize, k))
y = X.dot(beta) + da.random.normal(0, 2, size=n, chunks=(chunksize,)) # add noise
X, y = persist(X, y) # trigger computation in the background
We define local functions for ADMM. These correspond to solving an l1-regularized Linear regression problem:
def local_f(beta, X, y, z, u, rho):
return ((y - X.dot(beta)) **2).sum() + (rho / 2) * np.dot(beta - z + u,
beta - z + u)
def local_grad(beta, X, y, z, u, rho):
return 2 * X.T.dot(X.dot(beta) - y) + rho * (beta - z + u)
def shrinkage(beta, t):
return np.maximum(0, beta - t) - np.maximum(0, -beta - t)
local_update2 = partial(local_update, f=local_f, fprime=local_grad)
lamduh = 7.2 # regularization parameter
# algorithm parameters
rho = 1.2
abstol = 1e-4
reltol = 1e-2
z = np.zeros(p) # the initial consensus estimate
# an array of the individual "dual variables" and parameter estimates,
# one for each chunk of data
u = np.array([np.zeros(p) for i in range(nchunks)])
betas = np.array([np.zeros(p) for i in range(nchunks)])
Finally because ADMM doesn’t want to work on distributed arrays, but instead on lists of remote numpy arrays (one numpy array per chunk of the dask.array) we convert each our Dask.arrays into a list of dask.delayed objects:
XD = X.to_delayed().flatten().tolist() # a list of numpy arrays, one for each chunk
yD = y.to_delayed().flatten().tolist()
Synchronous ADMM
In this algorithm we send out many tasks to run, collect their results, update parameters, and repeat. In this simple implementation we continue for a fixed amount of time but in practice we would want to check some convergence criterion.
start = time.time()
while time() - start < MAX_TIME:
# process each chunk in parallel, using the black-box 'local_update' function
betas = [delayed(local_update2)(xx, yy, bb, z, uu, rho)
for xx, yy, bb, uu in zip(XD, yD, betas, u)]
betas = np.array(da.compute(*betas)) # collect results back
# Update Parameters
ztilde = np.mean(betas + np.array(u), axis=0)
z = shrinkage(ztilde, lamduh / (rho * nchunks))
u += betas - z # update dual variables
# track convergence metrics
update_metrics()
Asynchronous ADMM
In the asynchronous version we send out only enough tasks to occupy all of our workers. We collect results one by one as they finish, update parameters, and then send out a new task.
# Submit enough tasks to occupy our current workers
starting_indices = np.random.choice(nchunks, size=ncores*2, replace=True)
futures = [client.submit(local_update, XD[i], yD[i], betas[i], z, u[i],
rho, f=local_f, fprime=local_grad)
for i in starting_indices]
index = dict(zip(futures, starting_indices))
# An iterator that returns results as they come in
pool = as_completed(futures, with_results=True)
start = time.time()
count = 0
while time() - start < MAX_TIME:
# Get next completed result
future, local_beta = next(pool)
i = index.pop(future)
betas[i] = local_beta
count += 1
# Update parameters (this could be made more efficient)
ztilde = np.mean(betas + np.array(u), axis=0)
if count < nchunks: # artificially inflate beta in the beginning
ztilde *= nchunks / (count + 1)
z = shrinkage(ztilde, lamduh / (rho * nchunks))
update_metrics()
# Submit new task to the cluster
i = random.randint(0, nchunks - 1)
u[i] += betas[i] - z
new_future = client.submit(local_update2, XD[i], yD[i], betas[i], z, u[i], rho)
index[new_future] = i
pool.add(new_future)
Batched Asynchronous ADMM
With enough distributed workers we find that our parameter-updating loop on the client can be the limiting factor. After profiling it seems that our client was bound not by updating parameters, but rather by computing the performance metrics that we are going to use for the convergence plots below (so not actually a limitation in practice). However we decided to leave this in because it is good practice for what is likely to occur in larger clusters, where the single machine that updates parameters is possibly overwhelmed by a high volume of updates from the workers. To resolve this, we build in batching.
Rather than update our parameters one by one, we update them with however many results have come in so far. This provides a natural defense against a slow client. This approach smoothly shifts our algorithm back over to the synchronous solution when the client becomes overwhelmed. (though again, at this scale we’re fine).
Conveniently, the as_completed iterator has a .batches() method that
iterates over all of the results that have come in so far.
# ... same setup as before
pool = as_completed(new_betas, with_results=True)
batches = pool.batches() # <<<--- this is new
while time() - start < MAX_TIME:
# Get all tasks that have come in since we checked last time
batch = next(batches) # <<<--- this is new
for future, result in batch:
i = index.pop(future)
betas[i] = result
count += 1
ztilde = np.mean(betas + np.array(u), axis=0)
if count < nchunks:
ztilde *= nchunks / (count + 1)
z = shrinkage(ztilde, lamduh / (rho * nchunks))
update_metrics()
# Submit as many new tasks as we collected
for _ in batch: # <<<--- this is new
i = random.randint(0, nchunks - 1)
u[i] += betas[i] - z
new_fut = client.submit(local_update2, XD[i], yD[i], betas[i], z, u[i], rho)
index[new_fut] = i
pool.add(new_fut)
Visual Comparison of Algorithms
To show the qualitative difference between the algorithms we include profile plots of each. Note the following:
- Synchronous has blocks of full CPU use followed by blocks of no use
- The Asynchrhonous methods are more smooth
- The Asynchronous single-update method has a lot of whitespace / time when CPUs are idling. This is artifiical and because our code that tracks convergence diagnostics for our plots below is wasteful and inside the client inner-loop
- We intentionally leave in this wasteful code so that we can reduce it by batching in the third plot, which is more saturated.
You can zoom in using the tools to the upper right of each plot. You can view the full profile in a full window by clicking on the “View full page” link.
Synchronous
Asynchronous single-update
Asynchronous batched-update
Plot Convergence Criteria
Analysis
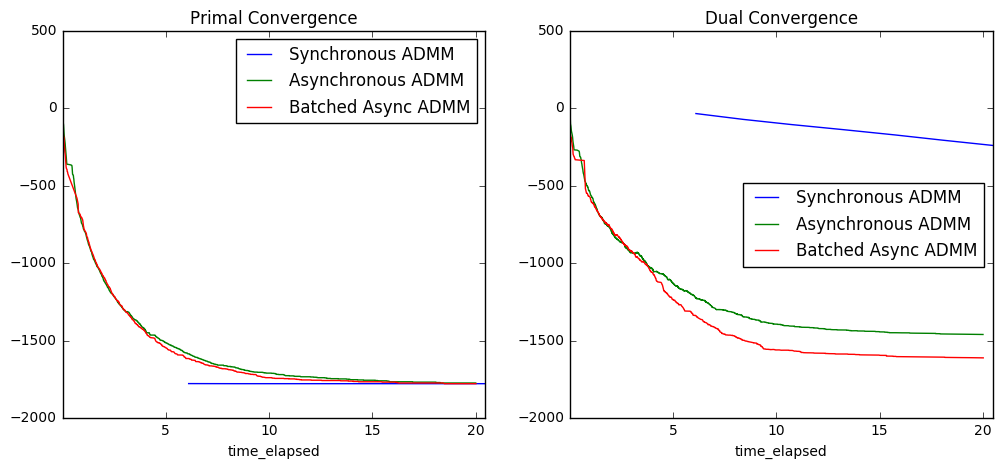
To get a better sense of what these plots convey, recall that optimization problems always come in pairs: the primal problem is typically the main problem of interest, and the dual problem is a closely related problem that provides information about the constraints in the primal problem. Perhaps the most famous example of duality is the Max-flow-min-cut Theorem from graph theory. In many cases, solving both of these problems simultaneously leads to gains in performance, which is what ADMM seeks to do.
In our case, the constraint in the primal problem is that all workers must agree on the optimum parameter estimate. Consequently, we can think of the dual variables (one for each chunk of data) as measuring the “cost” of agreement for their respective chunks. Intuitively, they will start out small and grow incrementally to find the right “cost” for each worker to have consensus. Eventually, they will level out at an optimum cost.
So:
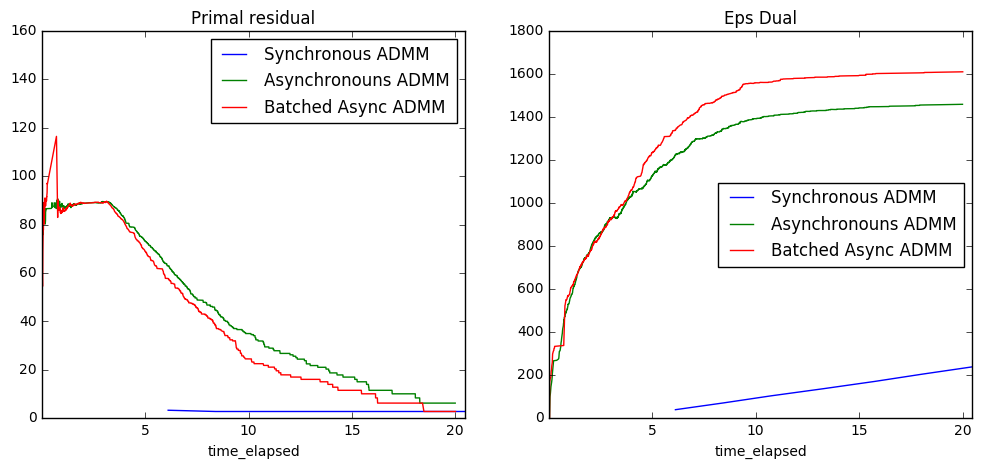
- the primal residual plot measures the amount of disagreement; “small” values imply agreement
- the dual residual plot measures the total “cost” of agreement; this increases until the correct cost is found
The plots then tell us the following:
- the cost of agreement is higher for asynchronous algorithms, which makes sense because each worker is always working with a slightly out-of-date global parameter estimate, making consensus harder
- blocked ADMM doesn’t update at all until shortly after 5 seconds have passed, whereas async has already had time to converge. (In practice with real data, we would probably specify that all workers need to report in every K updates).
- asynchronous algorithms take a little while for the information to properly diffuse, but once that happens they converge quickly.
- both asynchronous and synchronous converge almost immediately; this is most likely due to a high degree of homogeneity in the data (which was generated to fit the model well). Our next experiment should involve real world data.
What we could have done better
Analysis wise we expect richer results by performing this same experiment on a real world data set that isn’t as homogeneous as the current toy dataset.
Performance wise we can get much better CPU saturation by doing two things:
- Not running our convergence diagnostics, or making them much faster
- Not running full
np.meancomputations over all of beta when we’ve only updated a few elements. Instead we should maintain a running aggregation of these results.
With these two changes (each of which are easy) we’re fairly confident that we can scale out to decently large clusters while still saturating hardware.
blog comments powered by Disqus